Moon Rover
I worked for a year on Carnegie Mellon's moon rover development team.
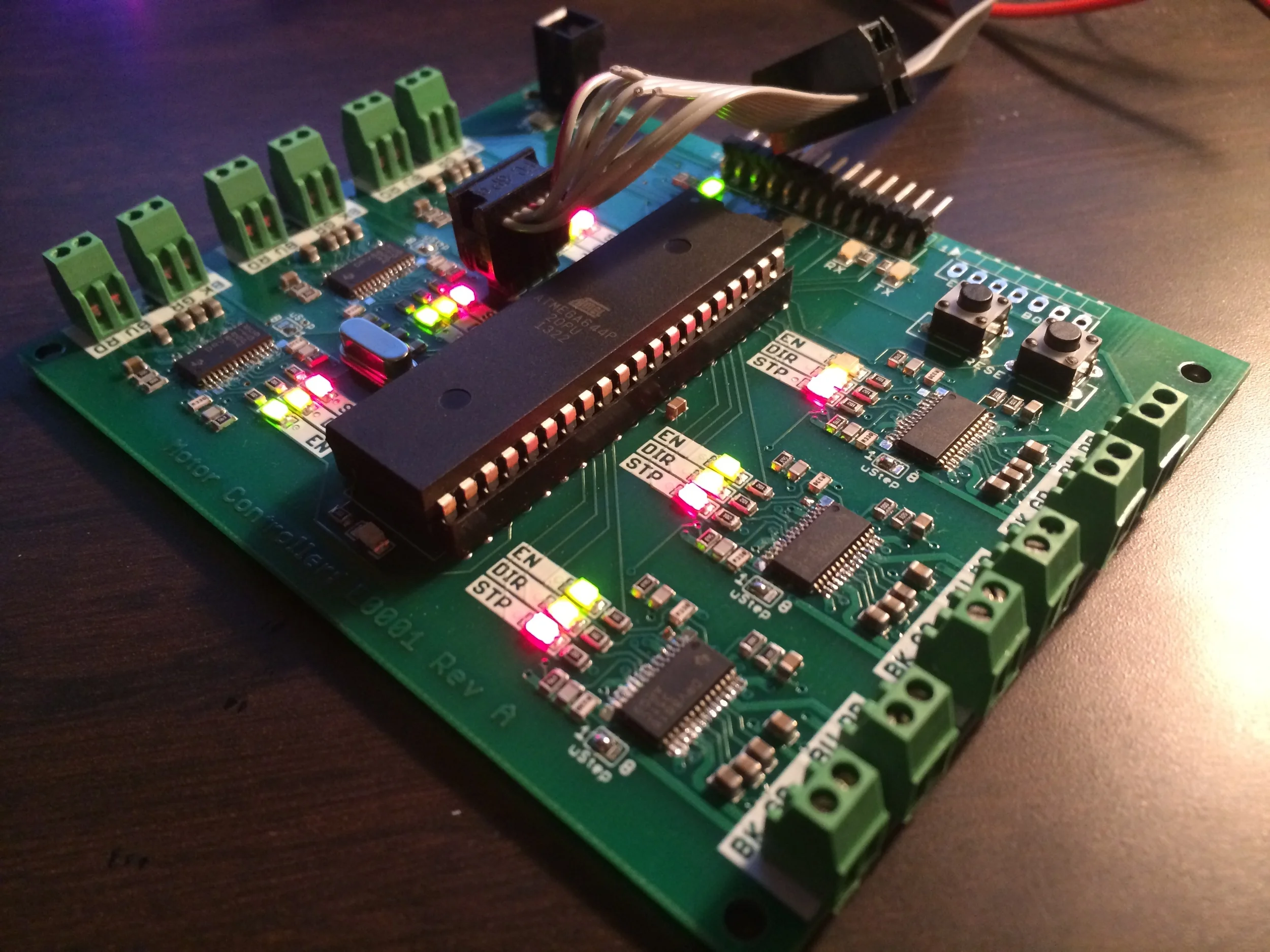
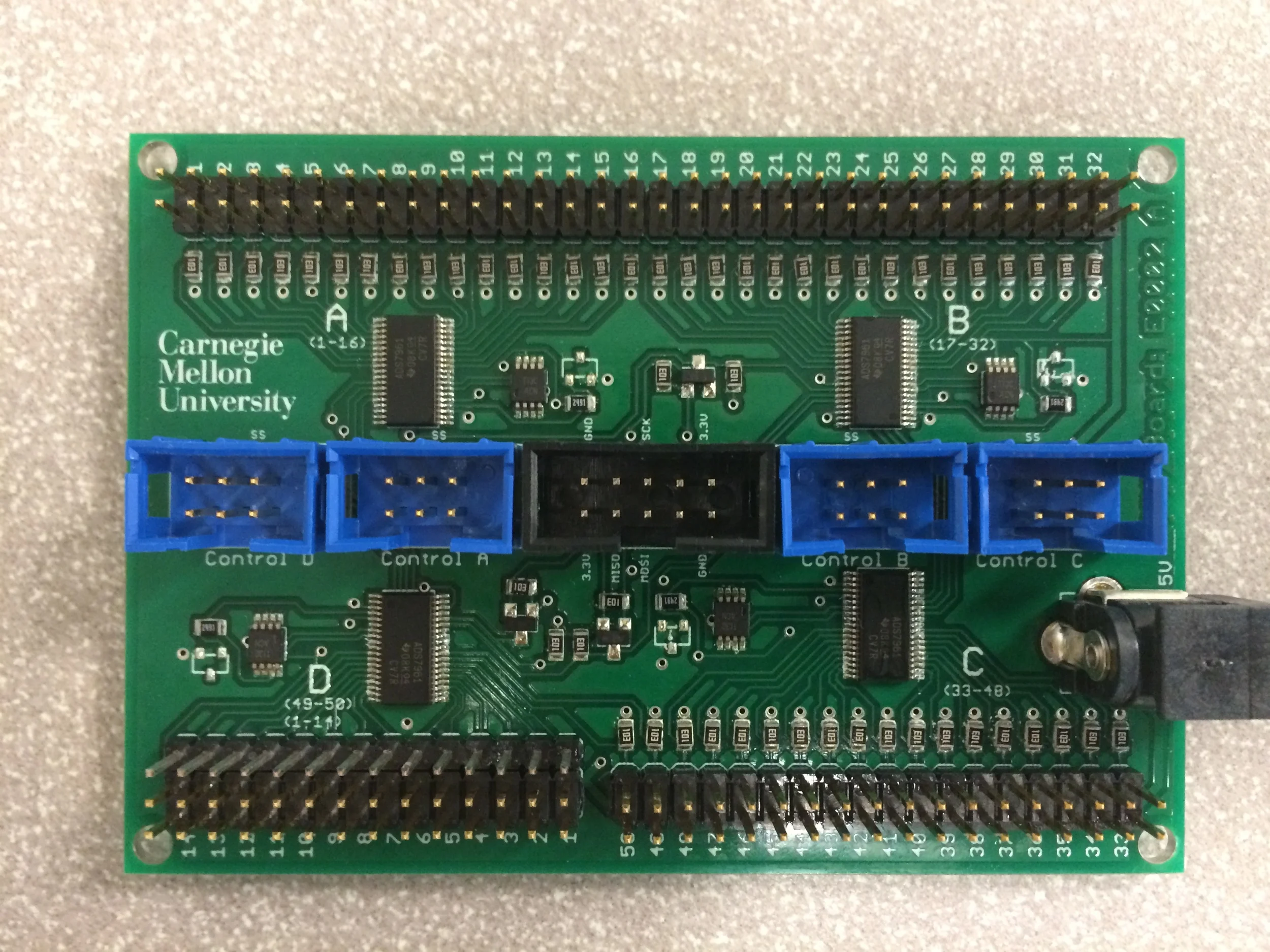
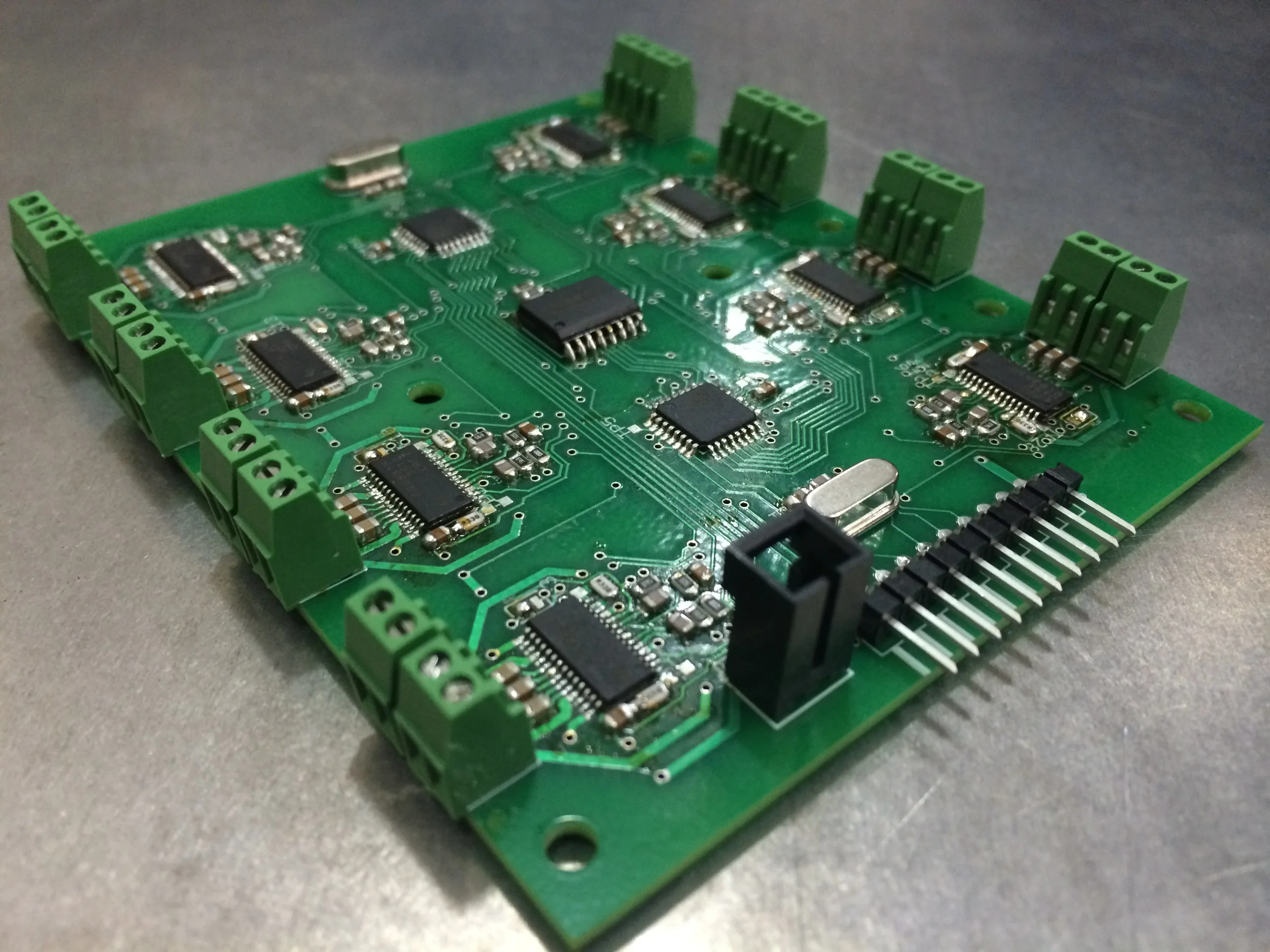
My primary position was a PCB designer, where I developed several boards crucial to the operation of the rover. I also piloted the rover through a 500-meter endurance test, and worked with component suppliers to select radiaton and vacuum tolerant components for the rover's avionics system. During my time on the team, we brought the rover from a concept sketched on a white board to a functioning, reliable prototype that is close to space-ready.
Carnegie Mellon University, in partnership with Astrobotic Technologies, plans to complete a lunar mission in 2016. As part of this mission, Carnegie Mellon intends to claim the Google Lunar XPrize. The criteria for Google's Lunar XPrize are straightforward: get a rover to the moon, drive 500 meters, and send back HD video to prove that you did it.
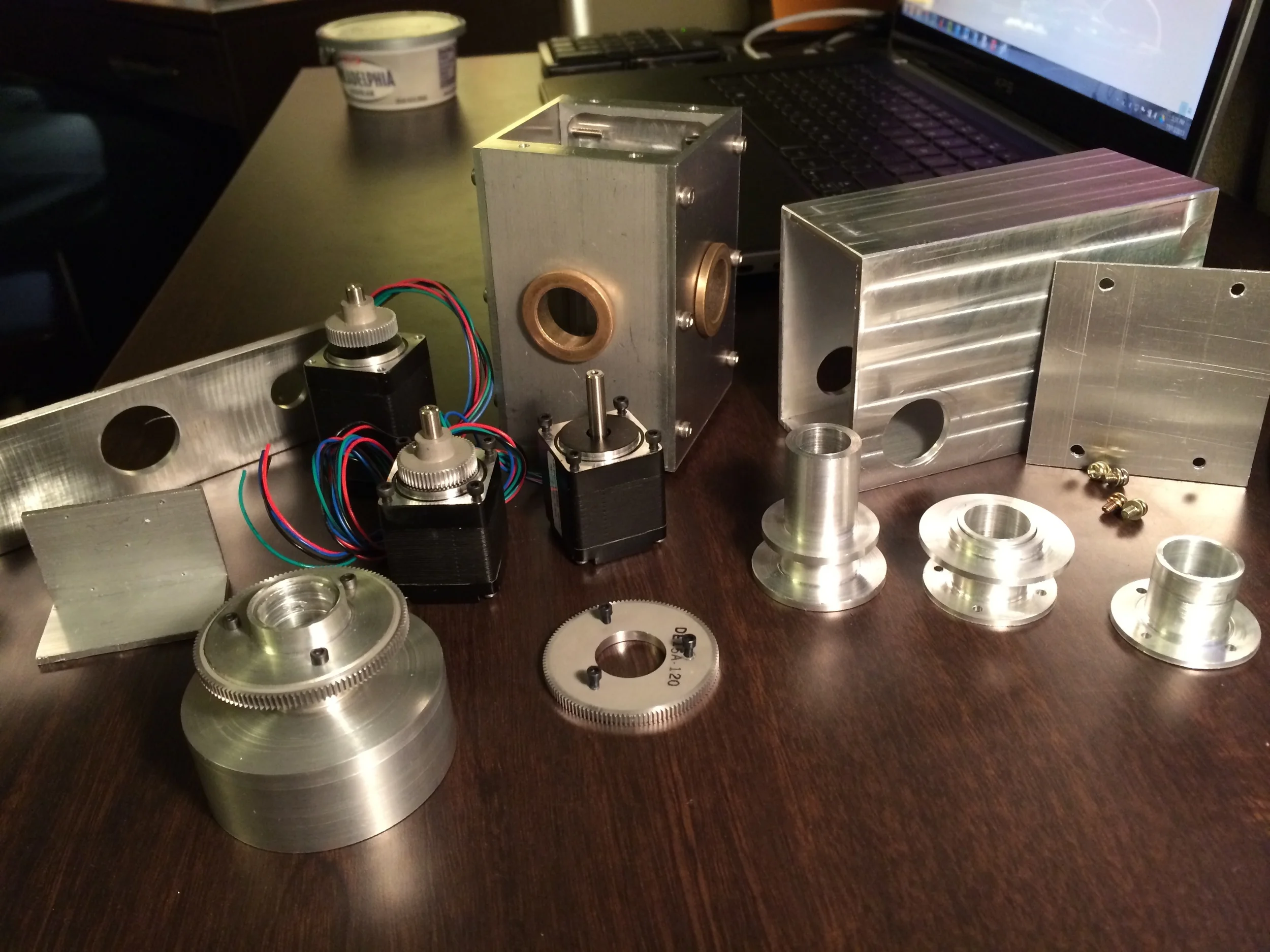
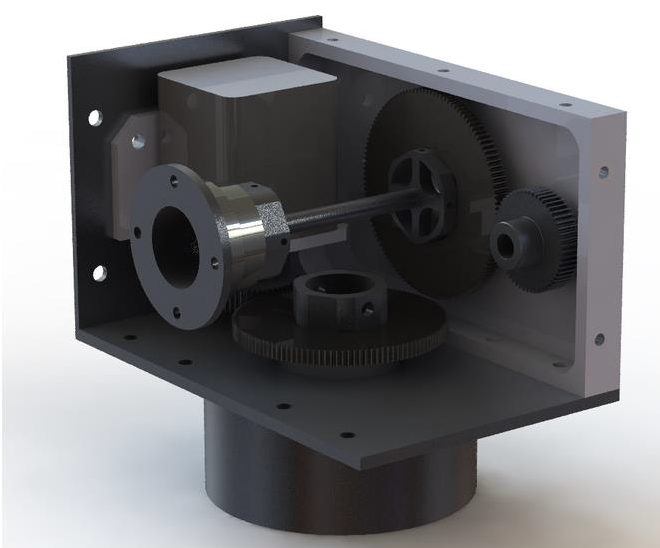
During early phases of development, I designed a precision stepper motor controller to drive the wheels, a camera pan/tilt mechanism, and the thermal sensing system. I also worked with systems engineering for the avionics system.
In December 2013, we conducted vacuum and mobility tests in simulated lunar gravity to verify the prototype rover's space-worthiness.
In May 2014, we conducted a 500-meter drive test (video below) on simulated lunar terrain outside of Pittsburgh. Myself and two teamates piloted the rover for the 18 hour test, via a low-res black-and-white camera feed with 5 seconds of lag built in to similuate transmission latency from the moon to Earth.